Thermal Sensors: What does the minimum measurable power specification mean?
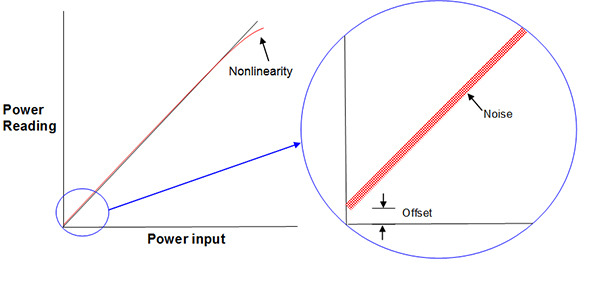
At very low powers the zero offset becomes important. This means that the sensor reads some value even if there is no input into it. This can be because of external heat sources or the fact that the meter is not zeroed properly. Now say that there is a zero offset of 10 mW = 0.01 W. If we are reading a laser of 10 W, then the meter will read 10.01 W, an additional error of 0.1%, very small. But if we are trying to measure 0.1 W, then the reading will be 0.11 W, an error of 10%! This is illustrated in the diagram below.
This brings us to the question of what is the minimum measurable power which appears in our specifications. What does it mean?
The diagram shown below is an exaggerated view of a thermal power sensor reading power. Aside from zero offset, which in principle we can get rid of by careful offset subtraction, there are 2 other types of disturbance to the reading:
Noise, which is a rapid fluctuation of the reading. Drift, which is a slow variation in the reading, usually due to changes in the background temperature.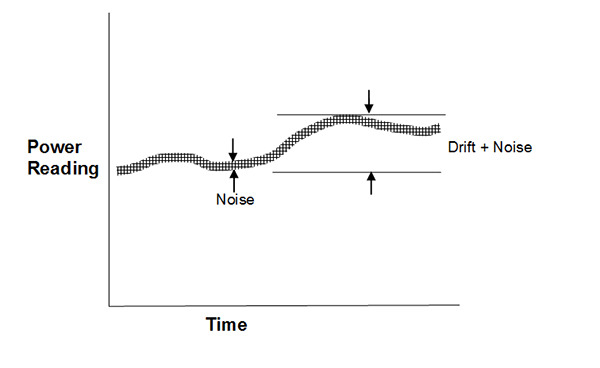
When Ophir defines the minimum measurable power, we take a very strict interpretation of this. We define the minimum measurable power as 20X the drift +3 sigma noise. Other manufacturers often define this as the 1 sigma noise. This means that the minimum measurable power is often defined as the minimum power that you can measure anything i.e. a movement in the reading vs. not measuring.
Ophir’s definition of the minimum measurable power is the power that you can get a serious measurement result with error considerably less than 5%.